2.预测控制要素及工作流程
以下为《2.预测控制要素及工作流程》的无排版文字预览,完整内容请下载
ym (k) = a1y(k-1)+ a2y(k-2)+ b1u(k-1)
ym(k+1/k) = a1y(k)+ a2y(k-1)+ b1u(k)
ym(k+2/k) = a1ym(k+1/k)+ a2y(k)+ b1u(k+1)
= a1ym(k+1/k)+ a2y(k)+ b1u(k)(如果只基于当前做预测)
?
ym(k+P/k)= a1ym(k+P-1/k)+ a2ym(k+P-2/k)+ b1u(k+P-1/k)预测控制三要素:模型预测、滚动优化、反馈校正
预测控制四要素:参考轨迹、模型预测、滚动优化、反馈校正
在MPC中,通过在给定域内求解一离散时间优化控制问题,产生一最优开环控制序列,该序列的第一项被执行。下一个采样周期,基于新的测量值重新求解优化控制问题。(国家发展阶段性五年规划、大公司的秘书为领导的日程安排)系统: y (k) = a1y(k-1)+ a2y(k-2)+ b1u(k-1)+XXXXX(k)预测
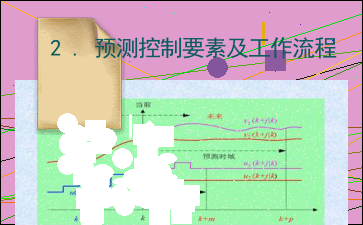
模型:非线性系统:y(k)= f[Y(k-1), U(k-d)]+XXXXX(k)2 预测控制要素及工作流程预测模型:y(k+j/k)= f[Y(k+j-1/k), U(k-d+j)]图2.1 预测控制的时序图s.t. 在k时刻,模型预测控制器采样得到系统状态x(k),并求解如式(2.1)优化问题,得到控制作用: (2.1)其中: 在上述计算中,性能指标为预测行为和期望未来行为的偏差值,该值越小性能越好。分别表示基于k时刻的信息得到的k+i时刻状态预测
和控制输入预测。预测是基于系统模型:系统的物理限制以及为保证系统稳定性或鲁棒性加入的其它限制。通过优化求解得到一开环控制序列,该序列的第一个值作用到系统,即的。约束包括然后,控制器滚动到下一控制周期,重复上述优化过程。
以上是针对一般线性和非线性系统的,对于系统模型为线性的情形,通常又取为如下二次型性能指标的形式: (2.2)式中: P——最大预测时域长度;
P1——最小预测时域长度,一般取P1=1;
M——控制时域长度;——输出预测误差及控制增量加权系数,一般取为常某某; 同样,通过优化求解得到一开环控制增量序列,该序列的第一个值作用到系统,即:然后,控制器滚动到下一控制周期,重复上述优化过程。 一般MPC算法包含预测模型、滚动优化和反馈校正三个基本特征。MPC是基于模型的控制,需要一个描述对象动态行为的基础模型。预测模型应具有预测的功能,即能够根据系统的历史信息和选定的未来输入,预测其未来输出值。在这里,预测模型只有功能上的要求,而没有结构形式上的限制,这一新思想、新方法突破了传统数学模型思想的约束,为建立高精度的信息模型铺平了道路。
内容过长,仅展示头部和尾部部分文字预览,全文请查看图片预览。 制参数选择的选择:的选择: 参考轨迹有助于减小过量的控制。在兼顾系统快速性的前提下,把柔化因子a取得大些(即取较大的惯性时间常数Tr)可以增强闭环系统的鲁棒性。(1) 算法选择
(2) 模型获取
(3) 开环特性测试
(4) 预测控制设计
(5) 参数调试2.6 预测控制工作流程了解系统基本特性(4.1) 参考轨迹设计
(4.2) 基于模型预测
(4.3) 滚动优化求解
(4.4) 反馈校正计算
(4.5) 控制作用实施[文章尾部最后300字内容到此结束,中间部分内容请查看底下的图片预览]请点击下方选择您需要的文档下载。
- 疫情防控控制组织结构图
- 旅游平台建设方案
- XX新诺微电子HZXNWDZecology0128-002升级包说明文档
- 人脸识别消费系统(解决方案)
- 数据分析期末论文
- 三年级语文第四单元教案 -
- 高校财务管理系统解决方案分析
- 关于重新发布1785-1805MHz频段无线接入系统频率使用事宜的通知
- 电子档案项目实施方案(通用)
- 用例规约模板
- 《数学广角----优化》教学反思
- 如何优化小学数学教学设计
- 细胞核系统的控制中心教学反思
- 新悦阳台壁挂使用说明书
- 大致时间计划
- ASCII码表
- 孙维刚谈立志成才:全班55%怎样考上北大、清华
- 在未知环境下面向位控机器人的力_位混合控制
- C网假环甄别分析案例
以上为《2.预测控制要素及工作流程》的无排版文字预览,完整内容请下载
2.预测控制要素及工作流程由用户“assssssssssssa”分享发布,转载请注明出处